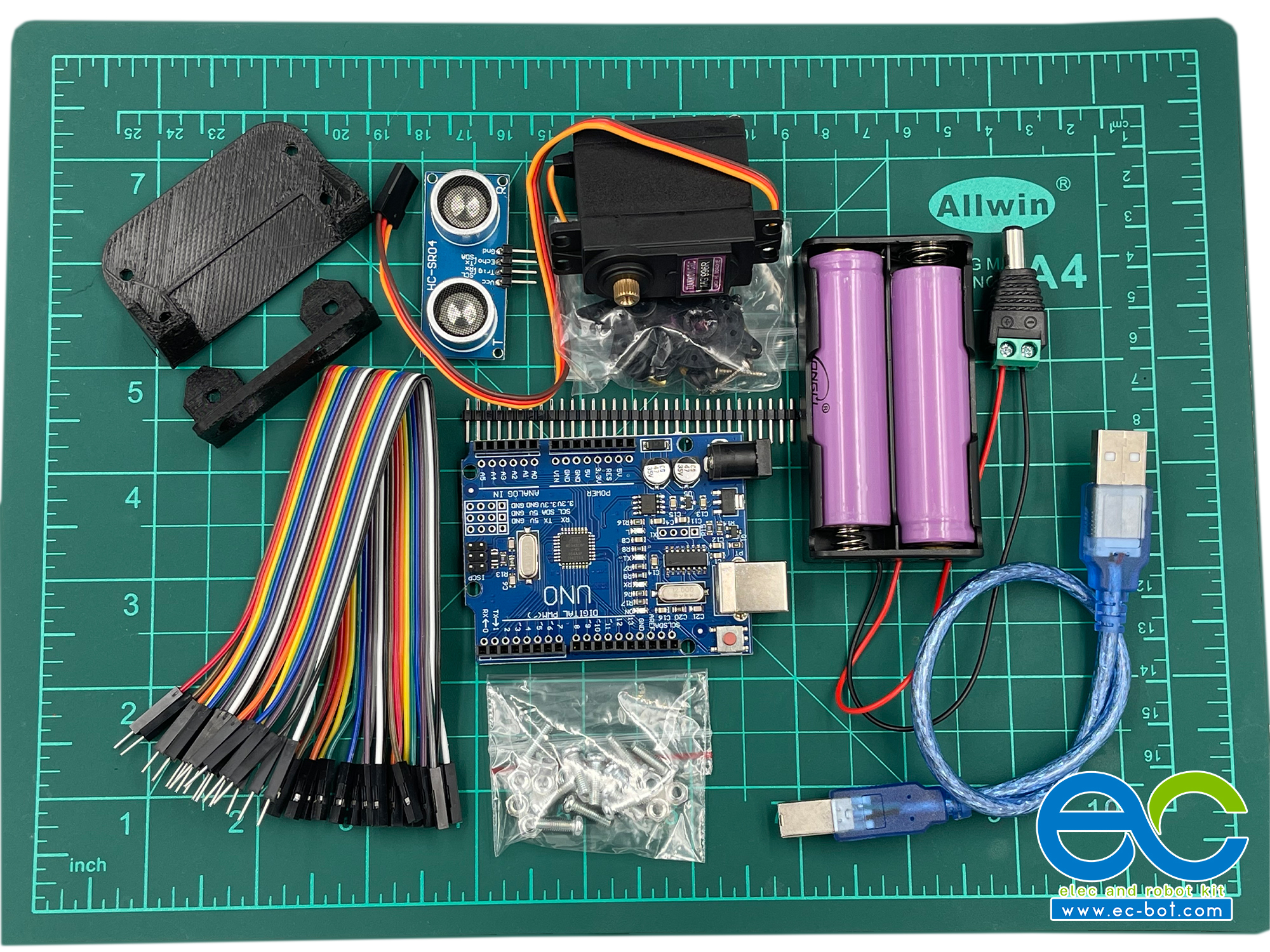
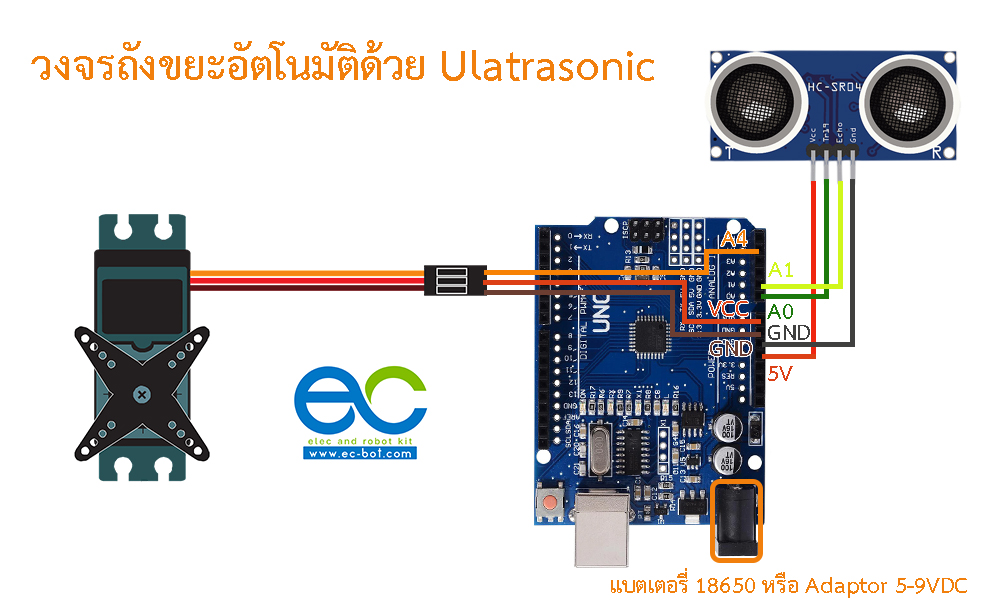
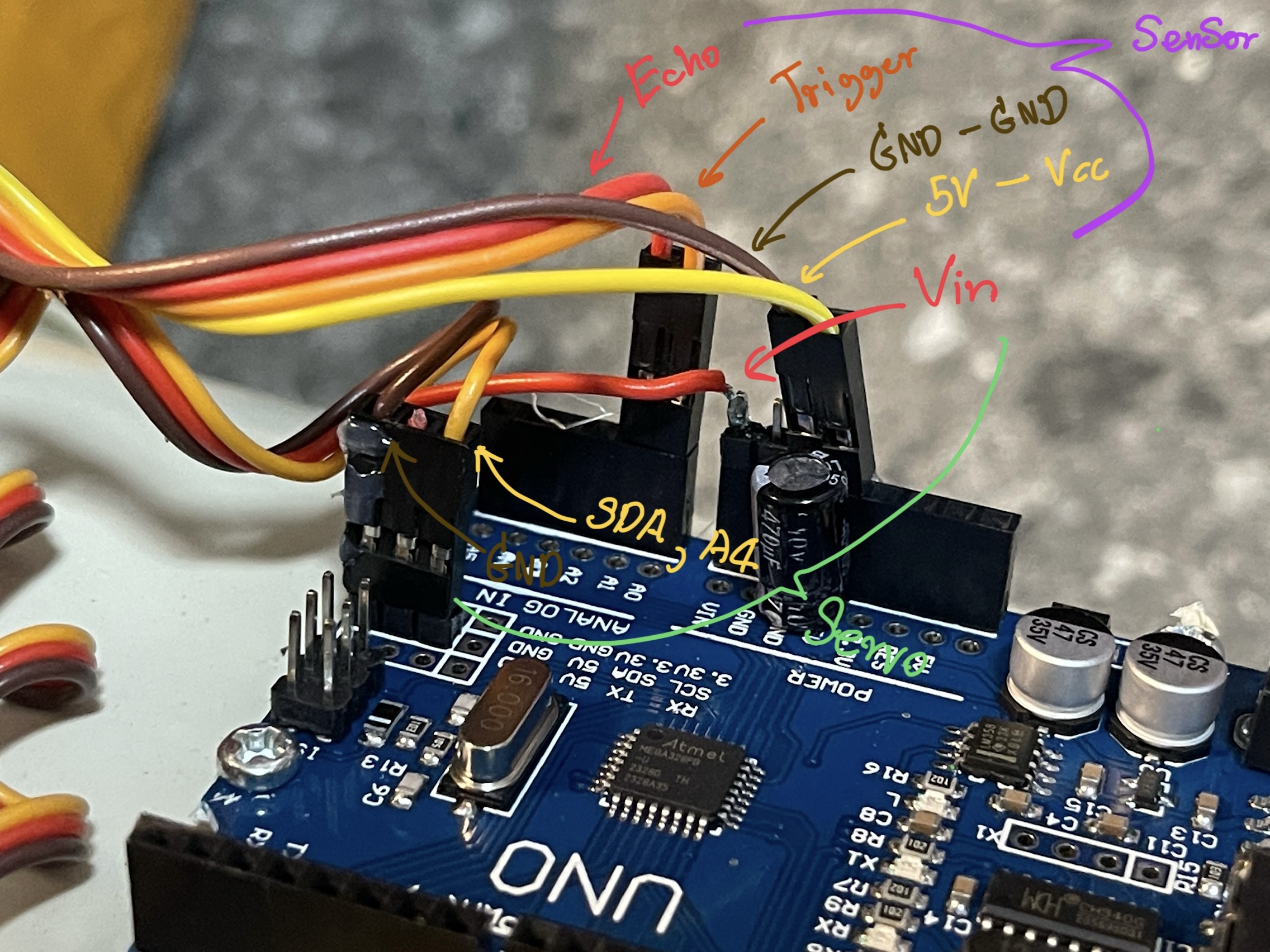
ชุดถังขยะอัตโนมัติ Arduino Uno + Ultrasonic เพื่อการศึกษา
| รหัสสินค้า | SET-02 |
| หมวดหมู่ | ชุดทำโปรเจคพร้อมใช้งาน |
| ราคา | 850.00 บาท |
| สถานะสินค้า | พร้อมส่ง |
| ลงสินค้า | 8 ก.ค. 2564 |
| อัพเดทล่าสุด | 30 พ.ย. 2568 |
| คงเหลือ | 10 ชิ้น |
| จำนวน | ชิ้น |
หยิบลงตะกร้า

รายละเอียดสินค้า
ขั้นตอนการ สร้างถังขยะ เปิด / ปิด แบบอัตโนมัติ ง่ายๆด้วย Arduino
1 ปีที่ผ่านมา
วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
ชำระเงินออนไลน์
- ค่าธรรมเนียม 3.9% + 11 THB
- การชำระผ่าน PayPal คุณไม่จำเป็นต้องแจ้งชำระเงิน เนื่องจากระบบจะจัดการให้คุณทันที ที่คุณชำระเงินเสร็จสมบูรณ์



คลิ๊ก JOIN เพื่อรับของแถม

ร้านEC-BOT อุปกรณ์อิเล็กทรอนิกส์และหุ่นยนต์
/www.ec-bot.com/
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ
ติดต่อ LINE QRcode

ข้อมูลของฉัน
▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

EC-BOT อุปกรณ์อิเล็กทรอนิกส์และหุ่นยนต์
จำหน่าย Arduino,Sensor,Module , อุปกรณ์อิเล็กทรอนิกส์ และ หุ่นยนต์
เบอร์โทร : 0626864269
อีเมล : nonlnwabu2015@gmail.com
อีเมล : nonlnwabu2015@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม