วิธีเขียนโปรแกรมควบคุม L298N กับชุดหุ่นยนต์ Arduino UNO R3 (Arduino รุ่นอื่นก็ใช้ได้นะครับ)
6 ปีที่ผ่านมา
วิธีเขียนโปรแกรมควบคุม L298N กับชุดหุ่นยนต์ Arduino UNO R3 (Arduino รุ่นอื่นก็ใช้ได้นะครับ )
หลายคนที่ซื้อชุดหุ่นย์จาก เว็บ EC.BOT ไปลองเขียนโปรแกรมบ้างท่านอาจจะชำนานเขียนโปรแกรมได้อย่างสบาย ๆ แต่ก็มีอีกหลาย ๆ ท่านนะครับที่ยังไม่เคยเขียนเลยแต่อยากจะลองฝึกเริ่มต้น วันนี้ทาง EC.BOT ก็มาเขียนบทความสอนเขียนโปรแกรมควบคุมไดร์มอเตอร์ L298N เบื้องต้นนะครับ มาเริ่มกันเล๊ยย
อุปกรณ์ที่ต้องมี
1. ชุดฝึกประกอบหุ่นยนต์ V2 พร้อมรางถ่าน
2. L298N Driver Motor 2A
3. Arduino,อาดูโน่ UNO R3 + สาย USB + ก้างปลา
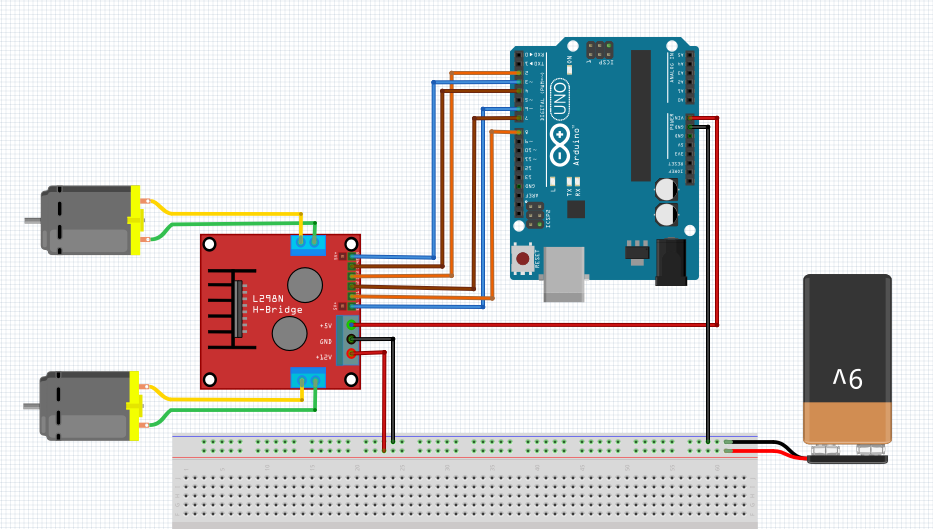
วิธีการต่อวงจรต่อตามรูปเลยนะครับ
ส่วนนี้เป็นของโปรแกรม ครับ
กรณี เมื่อเปรียบ HIGH=1,LOW,0 เมื่อสั่ง 1-0 มอเตอร์อาจหมุนซ้าย เมื่อสั่ง 0-1 มอเตอร์หมุนขวา เมื่อสั่ง 1-1 จะเกิดสถานะเบรค เมื่อสั่ง 0-0 จะเป็นการสั่งเพื่อปล่อยไหลตัว
ทั้งนี้ขึ้นอยู่กับ การต่อสายของมอเตอร์ด้วยนะครับ หากหมุนผิดด้านให้สลับสายไฟที่ขั่วมอเตอร์ หรือแก้ ลอจิก HIGH,LOW ที่โปรแกรมก็ได้เช่นกันครับ
หลายคนที่ซื้อชุดหุ่นย์จาก เว็บ EC.BOT ไปลองเขียนโปรแกรมบ้างท่านอาจจะชำนานเขียนโปรแกรมได้อย่างสบาย ๆ แต่ก็มีอีกหลาย ๆ ท่านนะครับที่ยังไม่เคยเขียนเลยแต่อยากจะลองฝึกเริ่มต้น วันนี้ทาง EC.BOT ก็มาเขียนบทความสอนเขียนโปรแกรมควบคุมไดร์มอเตอร์ L298N เบื้องต้นนะครับ มาเริ่มกันเล๊ยย
อุปกรณ์ที่ต้องมี
1. ชุดฝึกประกอบหุ่นยนต์ V2 พร้อมรางถ่าน
2. L298N Driver Motor 2A
3. Arduino,อาดูโน่ UNO R3 + สาย USB + ก้างปลา
วิธีการต่อวงจรต่อตามรูปเลยนะครับ
ส่วนนี้เป็นของโปรแกรม ครับ
| // Motor A |
| int dir1PinA = 8; // กำหนดชื่อ = พอร์ตที่จะใช้ (สามารถใช้พอร์ตอื่นที่มีที่ว่างบนบร์อดได้) |
| int dir2PinA = 7; // กำหนดชื่อ = พอร์ตที่จะใช้ (สามารถใช้พอร์ตอื่นที่มีที่ว่างบนบร์อดได้) |
| int speedPinA = 6; // เพื่อให้ PWM สามารถควบคุมความเร็วมอเตอร์ ขาที่จะสามารถกำหนด PWM ได้ต้องมีสัญลักษณ์ตัวหนอน (~) บนบอร์ดเท่านั้น |
| // Motor B |
| int dir1PinB = 2; // กำหนดชื่อ = พอร์ตที่จะใช้ (สามารถใช้พอร์ตอื่นที่มีที่ว่างบนบร์อดได้) |
| int dir2PinB = 4; // กำหนดชื่อ = พอร์ตที่จะใช้ (สามารถใช้พอร์ตอื่นที่มีที่ว่างบนบร์อดได้) |
| int speedPinB = 3; // เพื่อให้ PWM สามารถควบคุมความเร็วมอเตอร์ ขาที่จะสามารถกำหนด PWM ได้ต้องมีสัญลักษณ์ตัวหนอน (~) บนบอร์ดเท่านั้น |
| void setup() |
| { |
| Serial.begin(9600); |
| //กำหนด ขา เป็น Output เพื่อส่งออกข้อมูลไปสั่งงาน L298N |
| pinMode(dir1PinA,OUTPUT); // กำหนดขา 8 เป็น Output หมายถึง กำหนดขา 8 เป็นขาส่งสัญญาณออก |
| pinMode(dir2PinA,OUTPUT); // กำหนดขา 7 เป็น Output หมายถึง กำหนดขา 7 เป็นขาส่งสัญญาณออก |
| pinMode(speedPinA,OUTPUT); // กำหนดขา 6 เป็น Output หมายถึง กำหนดขา 6 เป็นขาส่งสัญญาณออก |
| pinMode(dir1PinB,OUTPUT); // กำหนดขา 2 เป็น Output หมายถึง กำหนดขา 8 เป็นขาส่งสัญญาณออก |
| pinMode(dir2PinB,OUTPUT); // กำหนดขา 4 เป็น Output หมายถึง กำหนดขา 8 เป็นขาส่งสัญญาณออก |
| pinMode(speedPinB,OUTPUT); // กำหนดขา 6 เป็น Output หมายถึง กำหนดขา 8 เป็นขาส่งสัญญาณออก |
| } |
| void loop() |
| { |
| // ชุด Motor A |
| analogWrite(speedPinA, 255); //ตั้งค่าความเร็ว PWM (0-255)ค่าต่ำลง มอเตอร์จะหมุนช้าลง |
| digitalWrite(dir1PinA, LOW); // สามารถสลับ HIGH,LOW ได้ เพื่อเปลี่ยนทิศทางการหมุนของมอเตอร์ |
| digitalWrite(dir2PinA, HIGH); // กรณี เมื่อเปรียบ HIGH=1,LOW,0 เมื่อสั่ง 1-0 มอเตอร์อาจหมุนซ้าย เมื่อสั่ง 0-1 มอเตอร์หมุนขวา เมื่อสั่ง 1-1 จะเกิดสถานะเบรค เมื่อสั่ง 0-0 จะเป็นการสั่งเพื่อปล่อยไหลตัว |
| // ชุด Motor B |
| analogWrite(speedPinB, 255); //ตั้งค่าความเร็ว PWM (0-255)ค่าต่ำลง มอเตอร์จะหมุนช้าลง |
| digitalWrite(dir1PinB, LOW); // สามารถสลับ HIGH,LOW ได้ เพื่อเปลี่ยนทิศทางการหมุนของมอเตอร์ |
| digitalWrite(dir2PinB, HIGH); // กรณี เมื่อเปรียบ HIGH=1,LOW,0 เมื่อสั่ง 1-0 มอเตอร์อาจหมุนซ้าย เมื่อสั่ง 0-1 มอเตอร์หมุนขวา เมื่อสั่ง 1-1 จะเกิดสถานะเบรค เมื่อสั่ง 0-0 จะเป็นการสั่งเพื่อปล่อยไหลตัว |
| } |
กรณี เมื่อเปรียบ HIGH=1,LOW,0 เมื่อสั่ง 1-0 มอเตอร์อาจหมุนซ้าย เมื่อสั่ง 0-1 มอเตอร์หมุนขวา เมื่อสั่ง 1-1 จะเกิดสถานะเบรค เมื่อสั่ง 0-0 จะเป็นการสั่งเพื่อปล่อยไหลตัว
| ลอจิก1 | ลอจิก2 | ผลลัพธ์มอเตอร์ |
| LOW | HIGH | หมุนซ้าย |
| HIGH | LOW | หมุนขวา |
| HIGH | HIGH | เบรค |
| LOW | LOW | ปล่อยไหล |
ทั้งนี้ขึ้นอยู่กับ การต่อสายของมอเตอร์ด้วยนะครับ หากหมุนผิดด้านให้สลับสายไฟที่ขั่วมอเตอร์ หรือแก้ ลอจิก HIGH,LOW ที่โปรแกรมก็ได้เช่นกันครับ




คลิ๊ก JOIN เพื่อรับของแถม

ร้านEC-BOT อุปกรณ์อิเล็กทรอนิกส์และหุ่นยนต์
/www.ec-bot.com/
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ
ติดต่อ LINE QRcode

ข้อมูลของฉัน
▲
▼
รายการสั่งซื้อของฉัน
รายการสั่งซื้อของฉัน
ข้อมูลร้านค้านี้

EC-BOT อุปกรณ์อิเล็กทรอนิกส์และหุ่นยนต์
จำหน่าย Arduino,Sensor,Module , อุปกรณ์อิเล็กทรอนิกส์ และ หุ่นยนต์
เบอร์โทร : 0626864269
อีเมล : nonlnwabu2015@gmail.com
อีเมล : nonlnwabu2015@gmail.com
ส่งข้อความติดต่อร้าน
เกี่ยวกับร้านค้านี้
ค้นหาสินค้าในร้านนี้
ค้นหาสินค้า
สินค้าที่ดูล่าสุด
บันทึกเป็นร้านโปรด
Join เป็นสมาชิกร้าน
แชร์หน้านี้
แชร์หน้านี้
↑
TOP เลื่อนขึ้นบนสุด
TOP เลื่อนขึ้นบนสุด
สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม